orbit.terrains#
Sub-package with utilities for creating terrains procedurally.
There are two main components in this package:
TerrainGenerator: This class procedurally generates terrains based on the passed sub-terrain configuration. It creates atrimeshmesh object and contains the origins of each generated sub-terrain.TerrainImporter: This class mainly deals with importing terrains from different possible sources and adding them to the simulator as a prim object. It also stores the terrain mesh into a dictionary calledTerrainImporter.warp_meshesthat later can be used for ray-casting. The following functions are available for importing terrains:TerrainImporter.import_ground_plane(): spawn a grid plane which is default in isaacsim/orbit.TerrainImporter.import_mesh(): spawn a prim from atrimeshobject.TerrainImporter.import_usd(): spawn a prim as reference to input USD file.
Classes
A class to handle terrain meshes and import them into the simulator. |
|
Configuration for the terrain manager. |
|
Terrain generator to handle different terrain generation functions. |
|
Configuration for the terrain generator. |
|
Base class for terrain configurations. |
Terrain importer#
- class omni.isaac.orbit.terrains.TerrainImporter[source]#
Bases:
objectA class to handle terrain meshes and import them into the simulator.
We assume that a terrain mesh comprises of sub-terrains that are arranged in a grid with rows
num_rowsand columnsnum_cols. The terrain origins are the positions of the sub-terrains where the robot should be spawned.Based on the configuration, the terrain importer handles computing the environment origins from the sub-terrain origins. In a typical setup, the number of sub-terrains (\(num\_rows \times num\_cols\)) is smaller than the number of environments (\(num\_envs\)). In this case, the environment origins are computed by sampling the sub-terrain origins.
If a curriculum is used, it is possible to update the environment origins to terrain origins that correspond to a harder difficulty. This is done by calling
update_terrain_levels(). The idea comes from game-based curriculum. For example, in a game, the player starts with easy levels and progresses to harder levels.Methods:
__init__(cfg)Initialize the terrain importer.
set_debug_vis(debug_vis)Set the debug visualization of the terrain importer.
import_ground_plane(key[, size])Add a plane to the terrain importer.
import_mesh(key, mesh)Import a mesh into the simulator.
import_usd(key, usd_path)Import a mesh from a USD file.
configure_env_origins([origins])Configure the origins of the environments based on the added terrain.
update_env_origins(env_ids, move_up, move_down)Update the environment origins based on the terrain levels.
Attributes:
A dictionary containing the names of the meshes and their keys.
A dictionary containing the names of the warp meshes and their keys.
The origins of the environments.
The origins of the sub-terrains in the added terrain mesh.
Whether the terrain importer has a debug visualization implemented.
A dictionary containing the sampled valid (flat) patches for the terrain.
- __init__(cfg: TerrainImporterCfg)[source]#
Initialize the terrain importer.
- Parameters:
cfg – The configuration for the terrain importer.
- Raises:
ValueError – If input terrain type is not supported.
ValueError – If terrain type is ‘generator’ and no configuration provided for
terrain_generator.ValueError – If terrain type is ‘usd’ and no configuration provided for
usd_path.ValueError – If terrain type is ‘usd’ or ‘plane’ and no configuration provided for
env_spacing.
- warp_meshes: dict[str, warp.Mesh]#
A dictionary containing the names of the warp meshes and their keys.
- env_origins: torch.Tensor#
The origins of the environments. Shape is (num_envs, 3).
- terrain_origins: torch.Tensor | None#
The origins of the sub-terrains in the added terrain mesh. Shape is (num_rows, num_cols, 3).
If None, then it is assumed no sub-terrains exist. The environment origins are computed in a grid.
- property has_debug_vis_implementation: bool#
Whether the terrain importer has a debug visualization implemented.
This always returns True.
- property flat_patches: dict[str, torch.Tensor]#
A dictionary containing the sampled valid (flat) patches for the terrain.
This is only available if the terrain type is ‘generator’. For other terrain types, this feature is not available and the function returns an empty dictionary.
Please refer to the
TerrainGenerator.flat_patchesfor more information.
- set_debug_vis(debug_vis: bool) bool[source]#
Set the debug visualization of the terrain importer.
- Parameters:
debug_vis – Whether to visualize the terrain origins.
- Returns:
Whether the debug visualization was successfully set. False if the terrain importer does not support debug visualization.
- Raises:
RuntimeError – If terrain origins are not configured.
- import_ground_plane(key: str, size: tuple[float, float] = (2000000.0, 2000000.0))[source]#
Add a plane to the terrain importer.
- Parameters:
key – The key to store the mesh.
size – The size of the plane. Defaults to (2.0e6, 2.0e6).
- Raises:
ValueError – If a terrain with the same key already exists.
- import_mesh(key: str, mesh: trimesh.Trimesh)[source]#
Import a mesh into the simulator.
The mesh is imported into the simulator under the prim path
cfg.prim_path/{key}. The created path contains the mesh as apxr.UsdGeominstance along with visual or physics material prims.- Parameters:
key – The key to store the mesh.
mesh – The mesh to import.
- Raises:
ValueError – If a terrain with the same key already exists.
- import_usd(key: str, usd_path: str)[source]#
Import a mesh from a USD file.
We assume that the USD file contains a single mesh. If the USD file contains multiple meshes, then the first mesh is used. The function mainly helps in registering the mesh into the warp meshes and the meshes dictionary.
Note
We do not apply any material properties to the mesh. The material properties should be defined in the USD file.
- Parameters:
key – The key to store the mesh.
usd_path – The path to the USD file.
- Raises:
ValueError – If a terrain with the same key already exists.
- configure_env_origins(origins: np.ndarray | None = None)[source]#
Configure the origins of the environments based on the added terrain.
- Parameters:
origins – The origins of the sub-terrains. Shape is (num_rows, num_cols, 3).
- update_env_origins(env_ids: torch.Tensor, move_up: torch.Tensor, move_down: torch.Tensor)[source]#
Update the environment origins based on the terrain levels.
- class omni.isaac.orbit.terrains.TerrainImporterCfg[source]#
Configuration for the terrain manager.
Attributes:
The collision group of the terrain.
The absolute path of the USD terrain prim.
The number of environment origins to consider.
The type of terrain to generate.
The terrain generator configuration.
The path to the USD file containing the terrain.
The spacing between environment origins when defined in a grid.
The visual material of the terrain.
The physics material of the terrain.
The maximum initial terrain level for defining environment origins.
Whether to enable visualization of terrain origins for the terrain.
- prim_path: str#
The absolute path of the USD terrain prim.
All sub-terrains are imported relative to this prim path.
- terrain_type: Literal['generator', 'plane', 'usd']#
The type of terrain to generate. Defaults to “generator”.
Available options are “plane”, “usd”, and “generator”.
- terrain_generator: TerrainGeneratorCfg | None#
The terrain generator configuration.
Only used if
terrain_typeis set to “generator”.
- usd_path: str | None#
The path to the USD file containing the terrain.
Only used if
terrain_typeis set to “usd”.
- env_spacing: float | None#
The spacing between environment origins when defined in a grid. Defaults to None.
Note
This parameter is used only when the
terrain_typeis"plane"or"usd".
- visual_material: sim_utils.VisualMaterialCfg | None#
The visual material of the terrain. Defaults to a dark gray color material.
The material is created at the path:
{prim_path}/visualMaterial. If None, then no material is created.Note
This parameter is used only when the
terrain_typeis"generator".
- physics_material: sim_utils.RigidBodyMaterialCfg#
The physics material of the terrain. Defaults to a default physics material.
The material is created at the path:
{prim_path}/physicsMaterial.Note
This parameter is used only when the
terrain_typeis"generator"or"plane".
- max_init_terrain_level: int | None#
The maximum initial terrain level for defining environment origins. Defaults to None.
The terrain levels are specified by the number of rows in the grid arrangement of sub-terrains. If None, then the initial terrain level is set to the maximum terrain level available (
num_rows - 1).Note
This parameter is used only when sub-terrain origins are defined.
Terrain generator#
- class omni.isaac.orbit.terrains.TerrainGenerator[source]#
Terrain generator to handle different terrain generation functions.
The terrains are represented as meshes. These are obtained either from height fields or by using the trimesh library. The height field representation is more flexible, but it is less computationally and memory efficient than the trimesh representation.
All terrain generation functions take in the argument
difficultywhich determines the complexity of the terrain. The difficulty is a number between 0 and 1, where 0 is the easiest and 1 is the hardest. In most cases, the difficulty is used for linear interpolation between different terrain parameters. For example, in a pyramid stairs terrain the step height is interpolated between the specified minimum and maximum step height.Each sub-terrain has a corresponding configuration class that can be used to specify the parameters of the terrain. The configuration classes are inherited from the
SubTerrainBaseCfgclass which contains the common parameters for all terrains.If a curriculum is used, the terrains are generated based on their difficulty parameter. The difficulty is varied linearly over the number of rows (i.e. along x). If a curriculum is not used, the terrains are generated randomly.
If the
cfg.flat_patch_samplingis specified for a sub-terrain, flat patches are sampled on the terrain. These can be used for spawning robots, targets, etc. The sampled patches are stored in theflat_patchesdictionary. The key specifies the intention of the flat patches and the value is a tensor containing the flat patches for each sub-terrain.If the flag
cfg.use_cacheis set to True, the terrains are cached based on their sub-terrain configurations. This means that if the same sub-terrain configuration is used multiple times, the terrain is only generated once and then reused. This is useful when generating complex sub-terrains that take a long time to generate.Methods:
__init__(cfg[, device])Initialize the terrain generator.
Attributes:
A dictionary of sampled valid (flat) patches for each sub-terrain.
List of trimesh.Trimesh objects for all the generated sub-terrains.
The origin of each sub-terrain.
A single trimesh.Trimesh object for all the generated sub-terrains.
- __init__(cfg: TerrainGeneratorCfg, device: str = 'cpu')[source]#
Initialize the terrain generator.
- Parameters:
cfg – Configuration for the terrain generator.
device – The device to use for the flat patches tensor.
- flat_patches: dict[str, torch.Tensor]#
A dictionary of sampled valid (flat) patches for each sub-terrain.
The dictionary keys are the names of the flat patch sampling configurations. This maps to a tensor containing the flat patches for each sub-terrain. The shape of the tensor is (num_rows, num_cols, num_patches, 3).
For instance, the key “root_spawn” maps to a tensor containing the flat patches for spawning an asset. Similarly, the key “target_spawn” maps to a tensor containing the flat patches for setting targets.
- terrain_meshes: list[trimesh.Trimesh]#
List of trimesh.Trimesh objects for all the generated sub-terrains.
- terrain_origins: numpy.ndarray#
The origin of each sub-terrain. Shape is (num_rows, num_cols, 3).
- terrain_mesh: trimesh.Trimesh#
A single trimesh.Trimesh object for all the generated sub-terrains.
- class omni.isaac.orbit.terrains.TerrainGeneratorCfg[source]#
Configuration for the terrain generator.
Attributes:
The seed for the random number generator.
Whether to use the curriculum mode.
The width (along x) and length (along y) of each sub-terrain (in m).
The width of the border around the terrain (in m).
Number of rows of sub-terrains to generate.
Number of columns of sub-terrains to generate.
Color scheme to use for the terrain.
The discretization of the terrain along the x and y axes (in m).
The discretization of the terrain along the z axis (in m).
The slope threshold above which surfaces are made vertical.
Dictionary of sub-terrain configurations.
The range of difficulty values for the sub-terrains.
Whether to load the terrain from cache if it exists.
The directory where the terrain cache is stored.
- seed: int | None#
The seed for the random number generator. Defaults to None, in which case the seed is not set.
- curriculum: bool#
Whether to use the curriculum mode. Defaults to False.
If True, the terrains are generated based on their difficulty parameter. Otherwise, they are randomly generated.
- size: tuple[float, float]#
The width (along x) and length (along y) of each sub-terrain (in m).
Note
This value is passed on to all the sub-terrain configurations.
- color_scheme: Literal['height', 'random', 'none']#
Color scheme to use for the terrain. Defaults to “none”.
The available color schemes are:
“height”: Color based on the height of the terrain.
“random”: Random color scheme.
“none”: No color scheme.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
This value is passed on to all the height field sub-terrain configurations.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
This value is passed on to all the height field sub-terrain configurations.
- slope_threshold: float | None#
The slope threshold above which surfaces are made vertical. Defaults to 0.75.
If None no correction is applied.
This value is passed on to all the height field sub-terrain configurations.
- sub_terrains: dict[str, omni.isaac.orbit.terrains.terrain_generator_cfg.SubTerrainBaseCfg]#
Dictionary of sub-terrain configurations.
The keys correspond to the name of the sub-terrain configuration and the values are the corresponding configurations.
- difficulty_range: tuple[float, float]#
The range of difficulty values for the sub-terrains. Defaults to (0.0, 1.0).
If curriculum is enabled, the terrains will be generated based on this range in ascending order of difficulty. Otherwise, the terrains will be generated based on this range in a random order.
- class omni.isaac.orbit.terrains.SubTerrainBaseCfg[source]#
Base class for terrain configurations.
All the sub-terrain configurations must inherit from this class.
The
sizeattribute is the size of the generated sub-terrain. Based on this, the terrain must extend from \((0, 0)\) to \((size[0], size[1])\).Attributes:
Function to generate the terrain.
Proportion of the terrain to generate.
The width (along x) and length (along y) of the terrain (in m).
Dictionary of configurations for sampling flat patches on the sub-terrain.
- function: Callable[[float, SubTerrainBaseCfg], tuple[list[trimesh.Trimesh], numpy.ndarray]]#
Function to generate the terrain.
This function must take as input the terrain difficulty and the configuration parameters and return a tuple with a list of
trimeshmesh objects and the terrain origin.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, omni.isaac.orbit.terrains.terrain_generator_cfg.FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Height fields#
This sub-module provides utilities to create different terrains as height fields (HF).
Height fields are a 2.5D terrain representation that is used in robotics to obtain the height of the terrain at a given point. This is useful for controls and planning algorithms.
Each terrain is represented as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively. The height of the terrain at a given point is obtained by indexing the array with the corresponding x and y coordinates.
Caution
When working with height field terrains, it is important to remember that the terrain is generated from a discretized 3D representation. This means that the height of the terrain at a given point is only an approximation of the real height of the terrain at that point. The discretization error is proportional to the size of the discretization cells. Therefore, it is important to choose a discretization size that is small enough for the application. A larger discretization size will result in a faster simulation, but the terrain will be less accurate.
All sub-terrains must inherit from the HfTerrainBaseCfg class which contains the common
parameters for all terrains generated from height fields.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfTerrainBaseCfg[source]#
Bases:
SubTerrainBaseCfgThe base configuration for height field terrains.
Attributes:
The width of the border/padding around the terrain (in m).
The discretization of the terrain along the x and y axes (in m).
The discretization of the terrain along the z axis (in m).
The slope threshold above which surfaces are made vertical.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
- slope_threshold: float | None#
The slope threshold above which surfaces are made vertical. Defaults to None, in which case no correction is applied.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Random Uniform Terrain#
- omni.isaac.orbit.terrains.height_field.hf_terrains.random_uniform_terrain(difficulty: float, cfg: hf_terrains_cfg.HfRandomUniformTerrainCfg) np.ndarray[source]#
Generate a terrain with height sampled uniformly from a specified range.
Note
The
difficultyparameter is ignored for this terrain.- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
The height field of the terrain as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively.
- Raises:
ValueError – When the downsampled scale is smaller than the horizontal scale.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfRandomUniformTerrainCfg[source]#
Bases:
HfTerrainBaseCfgConfiguration for a random uniform height field terrain.
Attributes:
The minimum and maximum height noise (i.e.
The minimum height (in m) change between two points.
The distance between two randomly sampled points on the terrain.
- noise_range: tuple[float, float]#
The minimum and maximum height noise (i.e. along z) of the terrain (in m).
- downsampled_scale: float | None#
The distance between two randomly sampled points on the terrain. Defaults to None, in which case the
horizontal scaleis used.The heights are sampled at this resolution and interpolation is performed for intermediate points. This must be larger than or equal to the
horizontal scale.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
Pyramid Sloped Terrain#
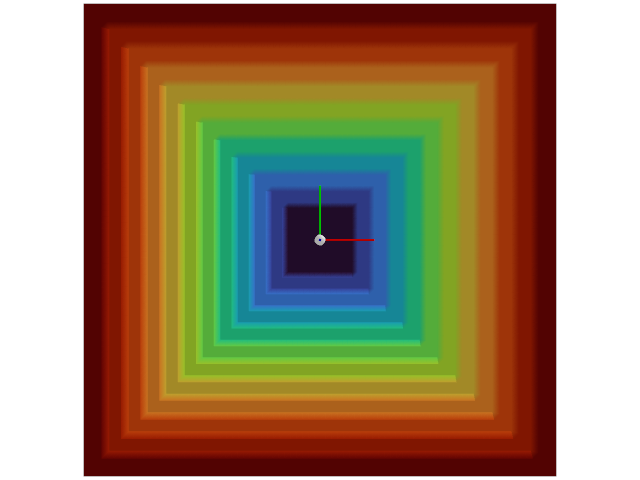
- omni.isaac.orbit.terrains.height_field.hf_terrains.pyramid_sloped_terrain(difficulty: float, cfg: hf_terrains_cfg.HfPyramidSlopedTerrainCfg) np.ndarray[source]#
Generate a terrain with a truncated pyramid structure.
The terrain is a pyramid-shaped sloped surface with a slope of
slopethat trims into a flat platform at the center. The slope is defined as the ratio of the height change along the x axis to the width along the x axis. For example, a slope of 1.0 means that the height changes by 1 unit for every 1 unit of width.If the
cfg.invertedflag is set toTrue, the terrain is inverted such that the platform is at the bottom.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
The height field of the terrain as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfPyramidSlopedTerrainCfg[source]#
Bases:
HfTerrainBaseCfgConfiguration for a pyramid sloped height field terrain.
Attributes:
The slope of the terrain (in radians).
The width of the square platform at the center of the terrain.
Whether the pyramid is inverted.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- inverted: bool#
Whether the pyramid is inverted. Defaults to False.
If True, the terrain is inverted such that the platform is at the bottom and the slopes are upwards.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfInvertedPyramidSlopedTerrainCfg[source]#
Bases:
HfPyramidSlopedTerrainCfgConfiguration for an inverted pyramid sloped height field terrain.
Note
This is a subclass of
HfPyramidSlopedTerrainCfgwithinvertedset to True. We make it as a separate class to make it easier to distinguish between the two and match the naming convention of the other terrains.- inverted: bool#
Whether the pyramid is inverted. Defaults to False.
If True, the terrain is inverted such that the platform is at the bottom and the slopes are upwards.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
Pyramid Stairs Terrain#
- omni.isaac.orbit.terrains.height_field.hf_terrains.pyramid_stairs_terrain(difficulty: float, cfg: hf_terrains_cfg.HfPyramidStairsTerrainCfg) np.ndarray[source]#
Generate a terrain with a pyramid stair pattern.
The terrain is a pyramid stair pattern which trims to a flat platform at the center of the terrain.
If the
cfg.invertedflag is set toTrue, the terrain is inverted such that the platform is at the bottom.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
The height field of the terrain as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfPyramidStairsTerrainCfg[source]#
Bases:
HfTerrainBaseCfgConfiguration for a pyramid stairs height field terrain.
Attributes:
The minimum and maximum height of the steps (in m).
The width of the steps (in m).
The width of the square platform at the center of the terrain.
Whether the pyramid stairs is inverted.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- inverted: bool#
Whether the pyramid stairs is inverted. Defaults to False.
If True, the terrain is inverted such that the platform is at the bottom and the stairs are upwards.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfInvertedPyramidStairsTerrainCfg[source]#
Bases:
HfPyramidStairsTerrainCfgConfiguration for an inverted pyramid stairs height field terrain.
Note
This is a subclass of
HfPyramidStairsTerrainCfgwithinvertedset to True. We make it as a separate class to make it easier to distinguish between the two and match the naming convention of the other terrains.- inverted: bool#
Whether the pyramid stairs is inverted. Defaults to False.
If True, the terrain is inverted such that the platform is at the bottom and the stairs are upwards.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
Discrete Obstacles Terrain#
- omni.isaac.orbit.terrains.height_field.hf_terrains.discrete_obstacles_terrain(difficulty: float, cfg: hf_terrains_cfg.HfDiscreteObstaclesTerrainCfg) np.ndarray[source]#
Generate a terrain with randomly generated obstacles as pillars with positive and negative heights.
The terrain is a flat platform at the center of the terrain with randomly generated obstacles as pillars with positive and negative height. The obstacles are randomly generated cuboids with a random width and height. They are placed randomly on the terrain with a minimum distance of
cfg.platform_widthfrom the center of the terrain.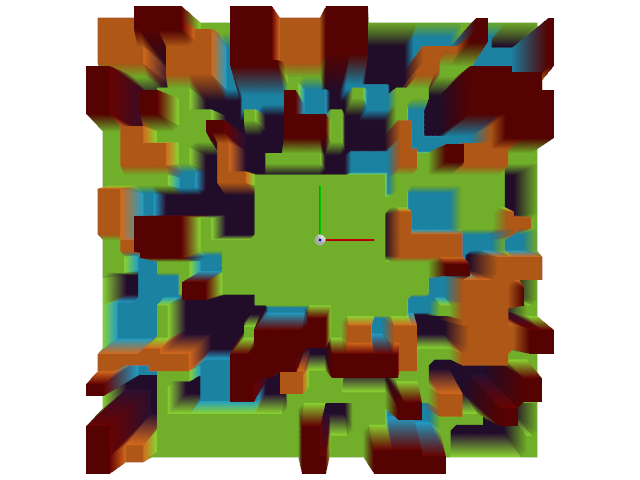
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
The height field of the terrain as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfDiscreteObstaclesTerrainCfg[source]#
Bases:
HfTerrainBaseCfgConfiguration for a discrete obstacles height field terrain.
Attributes:
The mode to use for the obstacle height.
The minimum and maximum width of the obstacles (in m).
The minimum and maximum height of the obstacles (in m).
The number of obstacles to generate.
The width of the square platform at the center of the terrain.
- obstacle_height_mode: str#
The mode to use for the obstacle height. Defaults to “choice”.
The following modes are supported: “choice”, “fixed”.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
Wave Terrain#
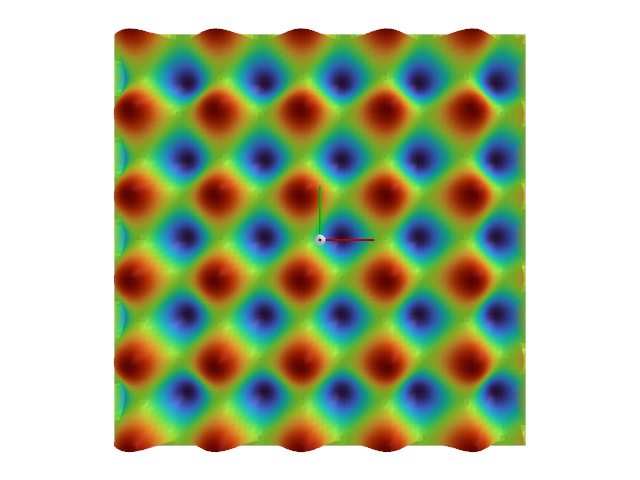
- omni.isaac.orbit.terrains.height_field.hf_terrains.wave_terrain(difficulty: float, cfg: hf_terrains_cfg.HfWaveTerrainCfg) np.ndarray[source]#
Generate a terrain with a wave pattern.
The terrain is a flat platform at the center of the terrain with a wave pattern. The wave pattern is generated by adding sinusoidal waves based on the number of waves and the amplitude of the waves.
The height of the terrain at a point \((x, y)\) is given by:
\[h(x, y) = A \left(\sin\left(\frac{2 \pi x}{\lambda}\right) + \cos\left(\frac{2 \pi y}{\lambda}\right) \right)\]where \(A\) is the amplitude of the waves, \(\lambda\) is the wavelength of the waves.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
The height field of the terrain as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively.
- Raises:
ValueError – When the number of waves is non-positive.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfWaveTerrainCfg[source]#
Bases:
HfTerrainBaseCfgConfiguration for a wave height field terrain.
Attributes:
The minimum and maximum amplitude of the wave (in m).
The number of waves to generate.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
Stepping Stones Terrain#
- omni.isaac.orbit.terrains.height_field.hf_terrains.stepping_stones_terrain(difficulty: float, cfg: hf_terrains_cfg.HfSteppingStonesTerrainCfg) np.ndarray[source]#
Generate a terrain with a stepping stones pattern.
The terrain is a stepping stones pattern which trims to a flat platform at the center of the terrain.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
The height field of the terrain as a 2D numpy array with discretized heights. The shape of the array is (width, length), where width and length are the number of points along the x and y axis, respectively.
- class omni.isaac.orbit.terrains.height_field.hf_terrains_cfg.HfSteppingStonesTerrainCfg[source]#
Bases:
HfTerrainBaseCfgConfiguration for a stepping stones height field terrain.
Attributes:
The maximum height of the stones (in m).
The minimum and maximum width of the stones (in m).
The minimum and maximum distance between stones (in m).
The depth of the holes (negative obstacles).
The width of the square platform at the center of the terrain.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border/padding around the terrain (in m). Defaults to 0.0.
The border width is subtracted from the
sizeof the terrain. If non-zero, it must be greater than or equal to thehorizontal scale.
- horizontal_scale: float#
The discretization of the terrain along the x and y axes (in m). Defaults to 0.1.
- vertical_scale: float#
The discretization of the terrain along the z axis (in m). Defaults to 0.005.
Trimesh terrains#
This sub-module provides methods to create different terrains using the trimesh library.
In contrast to the height-field representation, the trimesh representation does not create arbitrarily small triangles. Instead, the terrain is represented as a single tri-mesh primitive. Thus, this representation is more computationally and memory efficient than the height-field representation, but it is not as flexible.
Flat terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.flat_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshPlaneTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a flat terrain as a plane.
Note
The
difficultyparameter is ignored for this terrain.- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshPlaneTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a plane mesh terrain.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Pyramid terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.pyramid_stairs_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshPyramidStairsTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a pyramid stair pattern.
The terrain is a pyramid stair pattern which trims to a flat platform at the center of the terrain.
If
cfg.holesis True, the terrain will have pyramid stairs of length or widthcfg.platform_width(depending on the direction) with no steps in the remaining area. Additionally, no border will be added.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshPyramidStairsTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a pyramid stair mesh terrain.
Attributes:
The width of the border around the terrain (in m).
The minimum and maximum height of the steps (in m).
The width of the steps (in m).
The width of the square platform at the center of the terrain.
If True, the terrain will have holes in the steps.
- border_width: float#
The width of the border around the terrain (in m). Defaults to 0.0.
The border is a flat terrain with the same height as the terrain.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- holes: bool#
If True, the terrain will have holes in the steps. Defaults to False.
If
holesis True, the terrain will have pyramid stairs of length or widthplatform_width(depending on the direction) with no steps in the remaining area. Additionally, no border will be added.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Inverted pyramid terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.inverted_pyramid_stairs_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshInvertedPyramidStairsTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a inverted pyramid stair pattern.
The terrain is an inverted pyramid stair pattern which trims to a flat platform at the center of the terrain.
If
cfg.holesis True, the terrain will have pyramid stairs of length or widthcfg.platform_width(depending on the direction) with no steps in the remaining area. Additionally, no border will be added.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshInvertedPyramidStairsTerrainCfg[source]#
Bases:
MeshPyramidStairsTerrainCfgConfiguration for an inverted pyramid stair mesh terrain.
Note
This is the same as
MeshPyramidStairsTerrainCfgexcept that the steps are inverted.- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- border_width: float#
The width of the border around the terrain (in m). Defaults to 0.0.
The border is a flat terrain with the same height as the terrain.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- holes: bool#
If True, the terrain will have holes in the steps. Defaults to False.
If
holesis True, the terrain will have pyramid stairs of length or widthplatform_width(depending on the direction) with no steps in the remaining area. Additionally, no border will be added.
Random grid terrain#
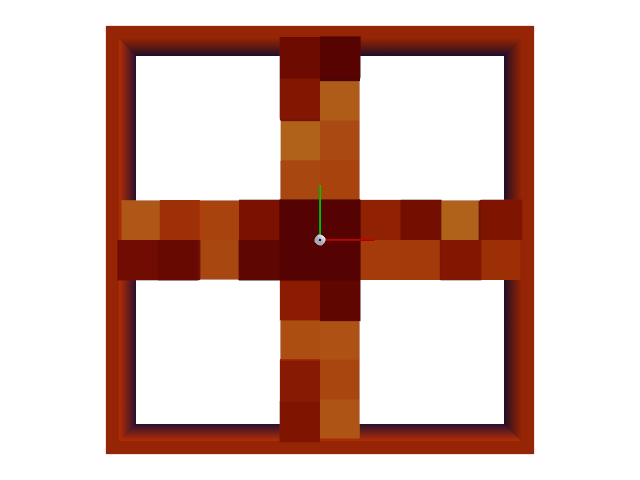
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.random_grid_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshRandomGridTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with cells of random heights and fixed width.
The terrain is generated in the x-y plane and has a height of 1.0. It is then divided into a grid of the specified size
cfg.grid_width. Each grid cell is then randomly shifted in the z-direction by a value uniformly sampled betweencfg.grid_height_range. At the center of the terrain, a platform of the specified widthcfg.platform_widthis generated.If
cfg.holesis True, the terrain will have randomized grid cells only along the plane extending from the platform (like a plus sign). The remaining area remains empty and no border will be added.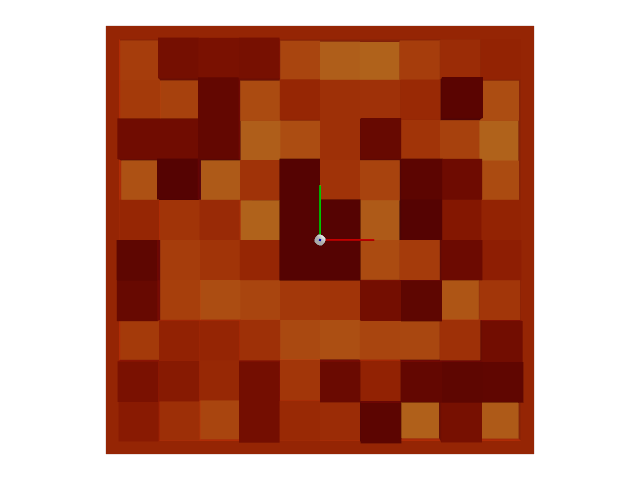
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- Raises:
ValueError – If the terrain is not square. This method only supports square terrains.
RuntimeError – If the grid width is large such that the border width is negative.
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshRandomGridTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a random grid mesh terrain.
Attributes:
The width of the grid cells (in m).
The minimum and maximum height of the grid cells (in m).
The width of the square platform at the center of the terrain.
If True, the terrain will have holes in the steps.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- holes: bool#
If True, the terrain will have holes in the steps. Defaults to False.
If
holesis True, the terrain will have randomized grid cells only along the plane extending from the platform (like a plus sign). The remaining area remains empty and no border will be added.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Rails terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.rails_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshRailsTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with box rails as extrusions.
The terrain contains two sets of box rails created as extrusions. The first set (inner rails) is extruded from the platform at the center of the terrain, and the second set is extruded between the first set of rails and the terrain border. Each set of rails is extruded to the same height.
- Parameters:
difficulty – The difficulty of the terrain. this is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshRailsTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a terrain with box rails as extrusions.
Attributes:
The thickness of the inner and outer rails (in m).
The minimum and maximum height of the rails (in m).
The width of the square platform at the center of the terrain.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Pit terrain#
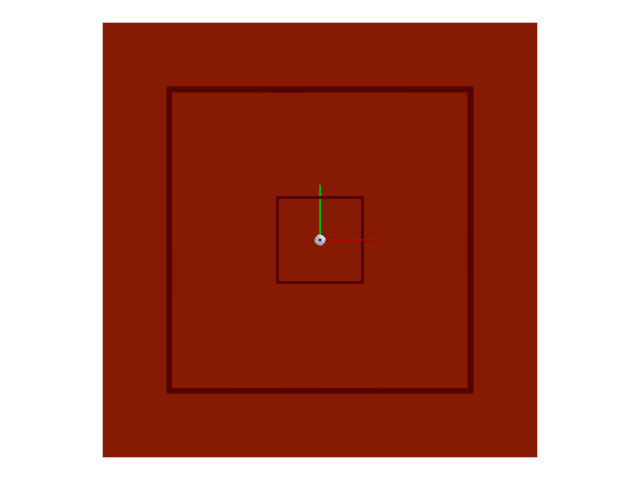
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.pit_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshPitTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a pit with levels (stairs) leading out of the pit.
The terrain contains a platform at the center and a staircase leading out of the pit. The staircase is a series of steps that are aligned along the x- and y- axis. The steps are created by extruding a ring along the x- and y- axis. If
is_double_pitis True, the pit contains two levels.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshPitTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a terrain with a pit that leads out of the pit.
Attributes:
The minimum and maximum height of the pit (in m).
The width of the square platform at the center of the terrain.
If True, the pit contains two levels of stairs.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Box terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.box_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshBoxTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with boxes (similar to a pyramid).
The terrain has a ground with boxes on top of it that are stacked on top of each other. The boxes are created by extruding a rectangle along the z-axis. If
double_boxis True, then two boxes of heightbox_heightare stacked on top of each other.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshBoxTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a terrain with boxes (similar to a pyramid).
Attributes:
The minimum and maximum height of the box (in m).
The width of the square platform at the center of the terrain.
If True, the pit contains two levels of stairs/boxes.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Gap terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.gap_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshGapTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a gap around the platform.
The terrain has a ground with a platform in the middle. The platform is surrounded by a gap of width
gap_widthon all sides.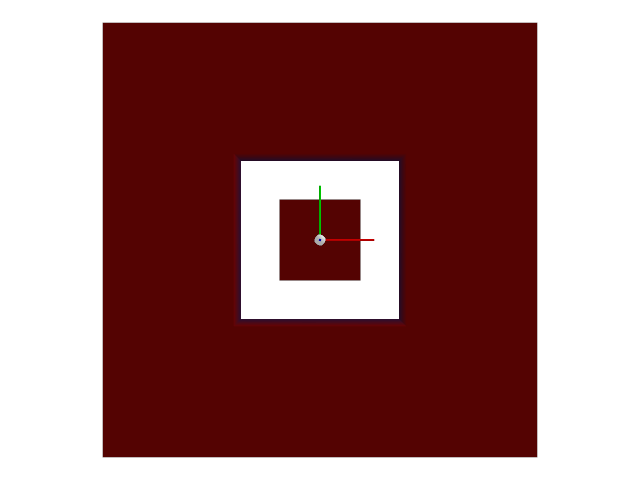
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshGapTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a terrain with a gap around the platform.
Attributes:
The minimum and maximum width of the gap (in m).
The width of the square platform at the center of the terrain.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Floating ring terrain#
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.floating_ring_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshFloatingRingTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a floating square ring.
The terrain has a ground with a floating ring in the middle. The ring extends from the center from
platform_widthtoplatform_width+ring_widthin the x and y directions. The thickness of the ring isring_thicknessand the height of the ring from the terrain isring_height.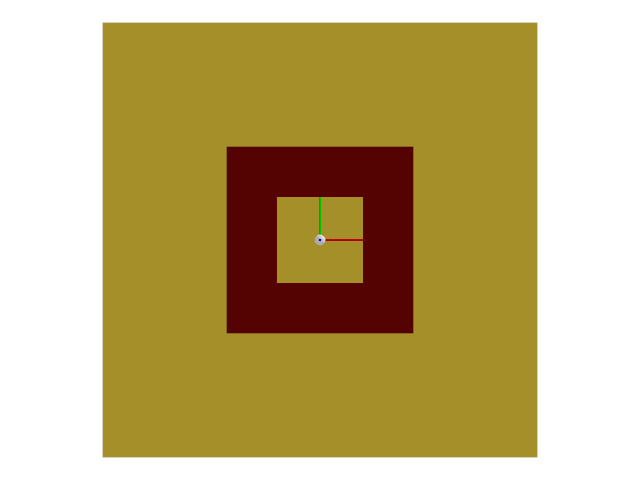
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshFloatingRingTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a terrain with a floating ring around the center.
Attributes:
The minimum and maximum width of the ring (in m).
The minimum and maximum height of the ring (in m).
The thickness (along z) of the ring (in m).
The width of the square platform at the center of the terrain.
- platform_width: float#
The width of the square platform at the center of the terrain. Defaults to 1.0.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Star terrain#
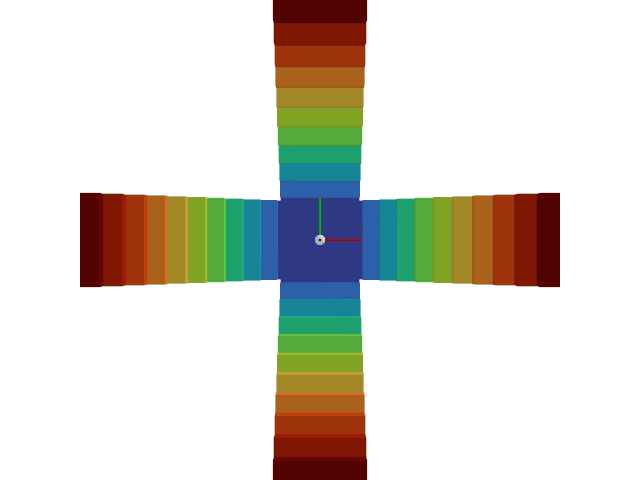
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.star_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshStarTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a star.
The terrain has a ground with a cylinder in the middle. The star is made of
num_barsbars with a width ofbar_widthand a height ofbar_height. The bars are evenly spaced around the cylinder and connect to the peripheral of the terrain.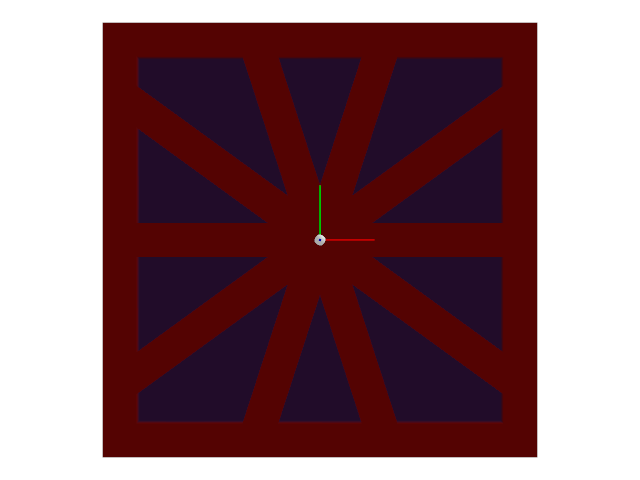
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- Raises:
ValueError – If
num_barsis less than 2.
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshStarTerrainCfg[source]#
Bases:
SubTerrainBaseCfgConfiguration for a terrain with a star pattern.
Attributes:
The number of bars per-side the star.
The minimum and maximum width of the bars in the star (in m).
The minimum and maximum height of the bars in the star (in m).
The width of the cylindrical platform at the center of the terrain.
- bar_height_range: tuple[float, float]#
The minimum and maximum height of the bars in the star (in m).
- platform_width: float#
The width of the cylindrical platform at the center of the terrain. Defaults to 1.0.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
Repeated Objects Terrain#
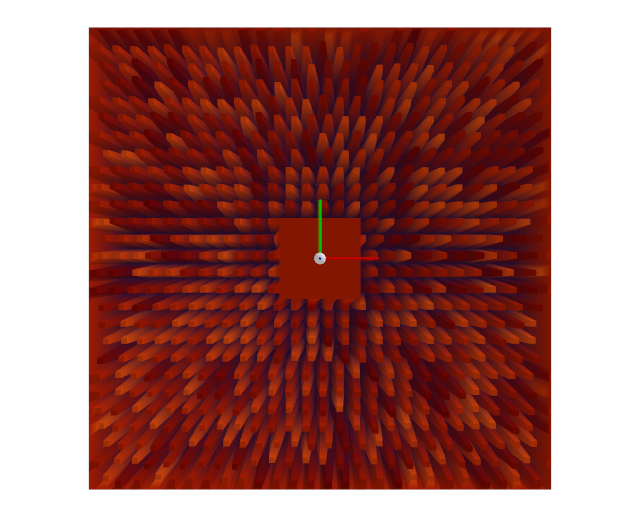
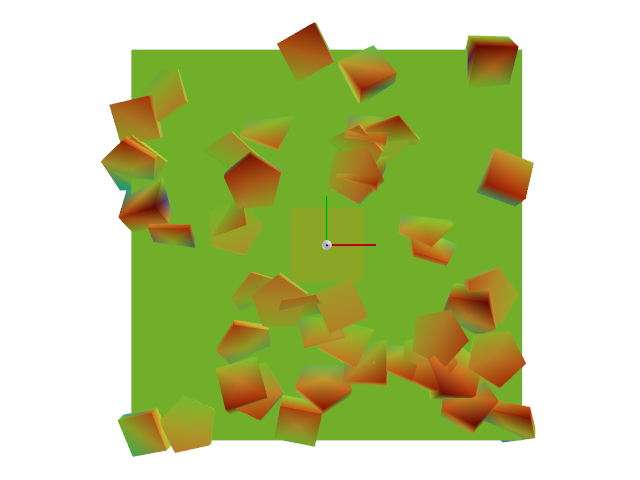
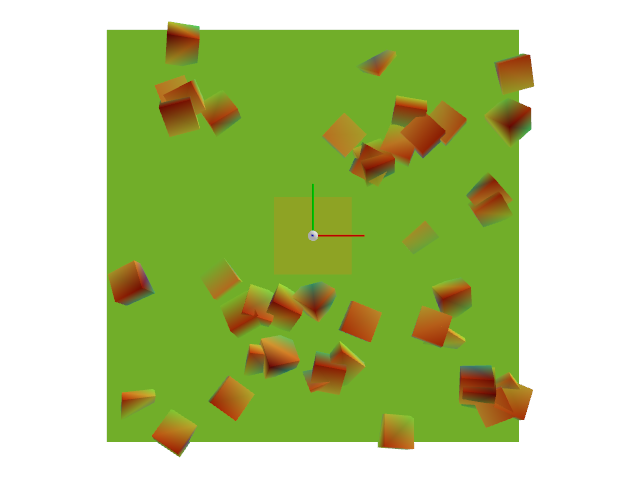
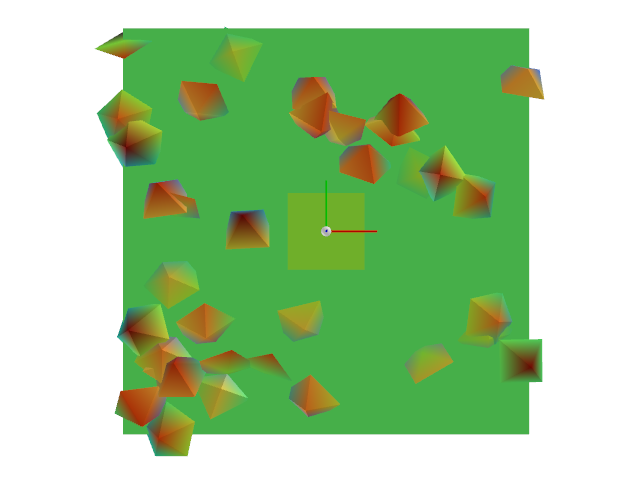
- omni.isaac.orbit.terrains.trimesh.mesh_terrains.repeated_objects_terrain(difficulty: float, cfg: mesh_terrains_cfg.MeshRepeatedObjectsTerrainCfg) tuple[list[trimesh.Trimesh], np.ndarray][source]#
Generate a terrain with a set of repeated objects.
The terrain has a ground with a platform in the middle. The objects are randomly placed on the terrain s.t. they do not overlap with the platform.
Depending on the object type, the objects are generated with different parameters. The objects The types of objects that can be generated are:
"cylinder","box","cone".The object parameters are specified in the configuration as curriculum parameters. The difficulty is used to linearly interpolate between the minimum and maximum values of the parameters.
- Parameters:
difficulty – The difficulty of the terrain. This is a value between 0 and 1.
cfg – The configuration for the terrain.
- Returns:
A tuple containing the tri-mesh of the terrain and the origin of the terrain (in m).
- Raises:
ValueError – If the object type is not supported. It must be either a string or a callable.
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshRepeatedObjectsTerrainCfg[source]#
Bases:
SubTerrainBaseCfgBase configuration for a terrain with repeated objects.
Classes:
Configuration of repeated objects.
Attributes:
The type of object to generate.
The object curriculum parameters at the start of the curriculum.
The object curriculum parameters at the end of the curriculum.
The maximum amount of noise to add to the height of the objects (in m).
The width of the cylindrical platform at the center of the terrain.
- class ObjectCfg[source]#
Bases:
objectConfiguration of repeated objects.
Attributes:
The number of objects to add to the terrain.
The height (along z) of the object (in m).
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- object_type: Literal['cylinder', 'box', 'cone'] | callable#
The type of object to generate.
The type can be a string or a callable. If it is a string, the function will look for a function called
make_{object_type}in the current module scope. If it is a callable, the function will use the callable to generate the object.
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshRepeatedPyramidsTerrainCfg[source]#
Bases:
MeshRepeatedObjectsTerrainCfgConfiguration for a terrain with repeated pyramids.
Classes:
Configuration for a curriculum of repeated pyramids.
Attributes:
The object curriculum parameters at the start of the curriculum.
The object curriculum parameters at the end of the curriculum.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- max_height_noise: float#
The maximum amount of noise to add to the height of the objects (in m). Defaults to 0.0.
- platform_width: float#
The width of the cylindrical platform at the center of the terrain. Defaults to 1.0.
- class ObjectCfg[source]#
Bases:
ObjectCfgConfiguration for a curriculum of repeated pyramids.
Attributes:
The radius of the pyramids (in m).
The maximum angle along the y and x axis.
Whether the angle is in degrees.
- object_type: Literal['cylinder', 'box', 'cone'] | callable#
The type of object to generate.
The type can be a string or a callable. If it is a string, the function will look for a function called
make_{object_type}in the current module scope. If it is a callable, the function will use the callable to generate the object.
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshRepeatedBoxesTerrainCfg[source]#
Bases:
MeshRepeatedObjectsTerrainCfgConfiguration for a terrain with repeated boxes.
Classes:
Configuration for repeated boxes.
Attributes:
The box curriculum parameters at the start of the curriculum.
The box curriculum parameters at the end of the curriculum.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- max_height_noise: float#
The maximum amount of noise to add to the height of the objects (in m). Defaults to 0.0.
- platform_width: float#
The width of the cylindrical platform at the center of the terrain. Defaults to 1.0.
- class ObjectCfg[source]#
Bases:
ObjectCfgConfiguration for repeated boxes.
Attributes:
The width (along x) and length (along y) of the box (in m).
The maximum angle along the y and x axis.
Whether the angle is in degrees.
- object_type: Literal['cylinder', 'box', 'cone'] | callable#
The type of object to generate.
The type can be a string or a callable. If it is a string, the function will look for a function called
make_{object_type}in the current module scope. If it is a callable, the function will use the callable to generate the object.
- class omni.isaac.orbit.terrains.trimesh.mesh_terrains_cfg.MeshRepeatedCylindersTerrainCfg[source]#
Bases:
MeshRepeatedObjectsTerrainCfgConfiguration for a terrain with repeated cylinders.
Classes:
Configuration for repeated cylinder.
Attributes:
The box curriculum parameters at the start of the curriculum.
The box curriculum parameters at the end of the curriculum.
- proportion: float#
Proportion of the terrain to generate. Defaults to 1.0.
This is used to generate a mix of terrains. The proportion corresponds to the probability of sampling the particular terrain. For example, if there are two terrains, A and B, with proportions 0.3 and 0.7, respectively, then the probability of sampling terrain A is 0.3 and the probability of sampling terrain B is 0.7.
- flat_patch_sampling: dict[str, FlatPatchSamplingCfg] | None#
Dictionary of configurations for sampling flat patches on the sub-terrain. Defaults to None, in which case no flat patch sampling is performed.
The keys correspond to the name of the flat patch sampling configuration and the values are the corresponding configurations.
- max_height_noise: float#
The maximum amount of noise to add to the height of the objects (in m). Defaults to 0.0.
- platform_width: float#
The width of the cylindrical platform at the center of the terrain. Defaults to 1.0.
- class ObjectCfg[source]#
Bases:
ObjectCfgConfiguration for repeated cylinder.
Attributes:
The radius of the pyramids (in m).
The maximum angle along the y and x axis.
Whether the angle is in degrees.
- object_type: Literal['cylinder', 'box', 'cone'] | callable#
The type of object to generate.
The type can be a string or a callable. If it is a string, the function will look for a function called
make_{object_type}in the current module scope. If it is a callable, the function will use the callable to generate the object.
Utilities#
Functions:
|
Color the vertices of a trimesh object based on the z-coordinate (height) of each vertex, using the Turbo colormap. |
|
Create a USD prim with mesh defined from vertices and triangles. |
|
Finds flat patches of given radius in the input mesh. |
- omni.isaac.orbit.terrains.utils.color_meshes_by_height(meshes: list[trimesh.Trimesh], **kwargs) trimesh.Trimesh[source]#
Color the vertices of a trimesh object based on the z-coordinate (height) of each vertex, using the Turbo colormap. If the z-coordinates are all the same, the vertices will be colored with a single color.
- Parameters:
meshes – A list of trimesh objects.
- Keyword Arguments:
color – A list of 3 integers in the range [0,255] representing the RGB color of the mesh. Used when the z-coordinates of all vertices are the same.
color_map – The name of the color map to be used. Defaults to “turbo”.
- Returns:
A trimesh object with the vertices colored based on the z-coordinate (height) of each vertex.
- omni.isaac.orbit.terrains.utils.create_prim_from_mesh(prim_path: str, mesh: trimesh.Trimesh, **kwargs)[source]#
Create a USD prim with mesh defined from vertices and triangles.
The function creates a USD prim with a mesh defined from vertices and triangles. It performs the following steps:
Create a USD Xform prim at the path
prim_path.Create a USD prim with a mesh defined from the input vertices and triangles at the path
{prim_path}/mesh.Assign a physics material to the mesh at the path
{prim_path}/physicsMaterial.Assign a visual material to the mesh at the path
{prim_path}/visualMaterial.
- Parameters:
prim_path – The path to the primitive to be created.
mesh – The mesh to be used for the primitive.
- Keyword Arguments:
translation – The translation of the terrain. Defaults to None.
orientation – The orientation of the terrain. Defaults to None.
visual_material – The visual material to apply. Defaults to None.
physics_material – The physics material to apply. Defaults to None.
- omni.isaac.orbit.terrains.utils.find_flat_patches(wp_mesh: wp.Mesh, num_patches: int, patch_radius: float | list[float], origin: np.ndarray | torch.Tensor | tuple[float, float, float], x_range: tuple[float, float], y_range: tuple[float, float], z_range: tuple[float, float], max_height_diff: float)[source]#
Finds flat patches of given radius in the input mesh.
The function finds flat patches of given radius based on the search space defined by the input ranges. The search space is characterized by origin in the mesh frame, and the x, y, and z ranges. The x and y ranges are used to sample points in the 2D region around the origin, and the z range is used to filter patches based on the height of the points.
The function performs rejection sampling to find the patches based on the following steps:
Sample patch locations in the 2D region around the origin.
Define a ring of points around each patch location to query the height of the points using ray-casting.
Reject patches that are outside the z range or have a height difference that is too large.
Keep sampling until all patches are valid.
- Parameters:
wp_mesh – The warp mesh to find patches in.
num_patches – The desired number of patches to find.
patch_radius – The radii used to form patches. If a list is provided, multiple patch sizes are checked. This is useful to deal with holes or other artifacts in the mesh.
origin – The origin defining the center of the search space. This is specified in the mesh frame.
x_range – The range of X coordinates to sample from.
y_range – The range of Y coordinates to sample from.
z_range – The range of valid Z coordinates used for filtering patches.
max_height_diff – The maximum allowable distance between the lowest and highest points on a patch to consider it as valid. If the difference is greater than this value, the patch is rejected.
- Returns:
A tensor of shape (num_patches, 3) containing the flat patches. The patches are defined in the mesh frame.
- Raises:
RuntimeError – If the function fails to find valid patches. This can happen if the input parameters are not suitable for finding valid patches and maximum number of iterations is reached.