Environments#
The following lists comprises of all the RL tasks implementations that are available in Orbit. While we try to keep this list up-to-date, you can always get the latest list of environments by running the following command:
./orbit.sh -p source/standalone/environments/list_envs.py
We are actively working on adding more environments to the list. If you have any environments that you would like to add to Orbit, please feel free to open a pull request!
Classic#
Classic environments that are based on IsaacGymEnvs implementation of MuJoCo-style environments.
World |
Environment ID |
Description |
|---|---|---|
|
Move towards a direction with the MuJoCo humanoid robot |
|
|
Move towards a direction with the MuJoCo ant robot |
|
|
Move the cart to keep the pole upwards in the classic cartpole control |
Manipulation#
Environments based on fixed-arm manipulation tasks.
For many of these tasks, we include configurations with different arm action spaces. For example, for the reach environment:
Isaac-Lift-Cube-Franka-v0: Franka arm with joint position control
Isaac-Lift-Cube-Franka-IK-Abs-v0: Franka arm with absolute IK control
Isaac-Lift-Cube-Franka-IK-Rel-v0: Franka arm with relative IK control
World |
Environment ID |
Description |
|---|---|---|
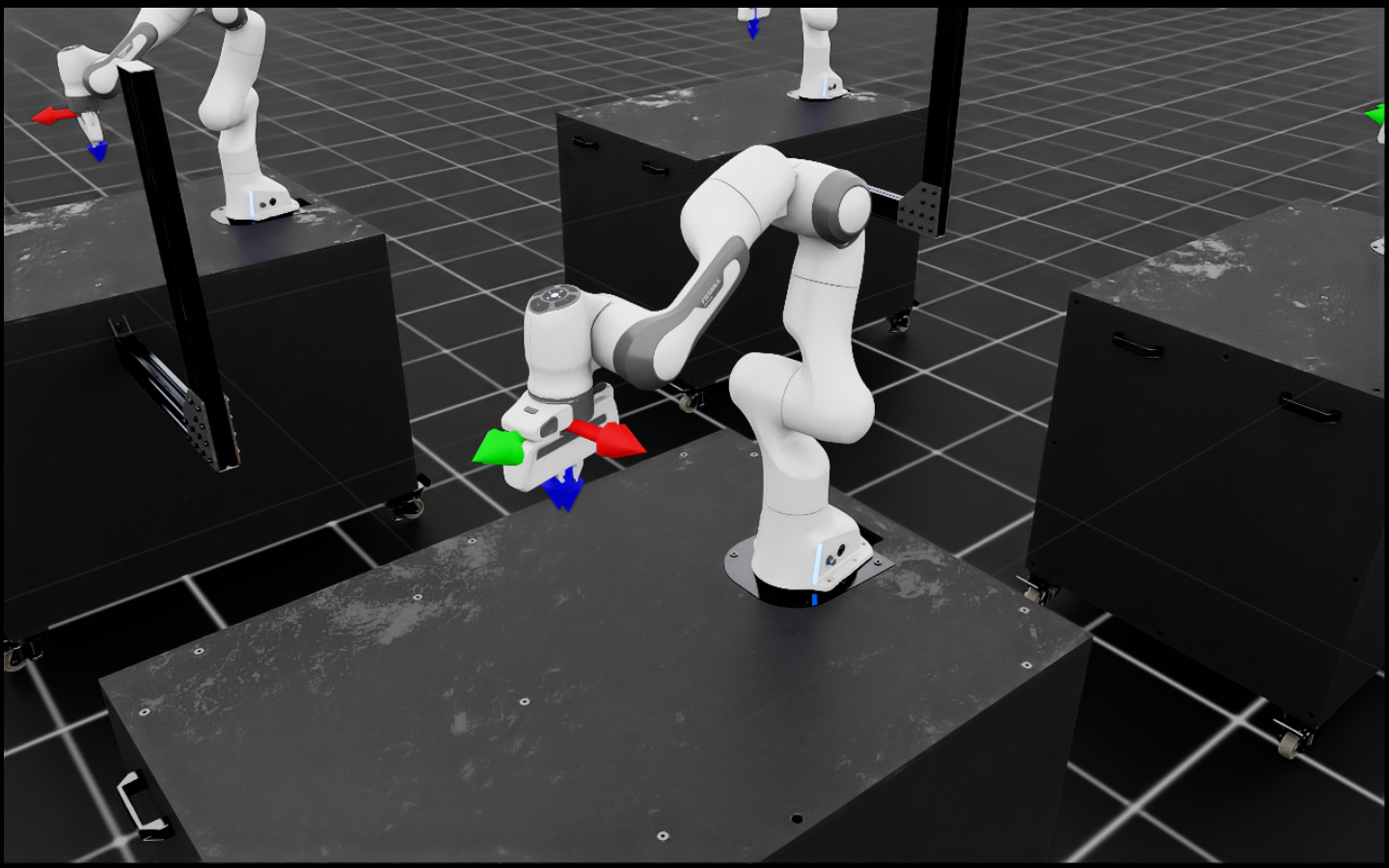
|
Move the end-effector to a sampled target pose with the Franka robot |
|
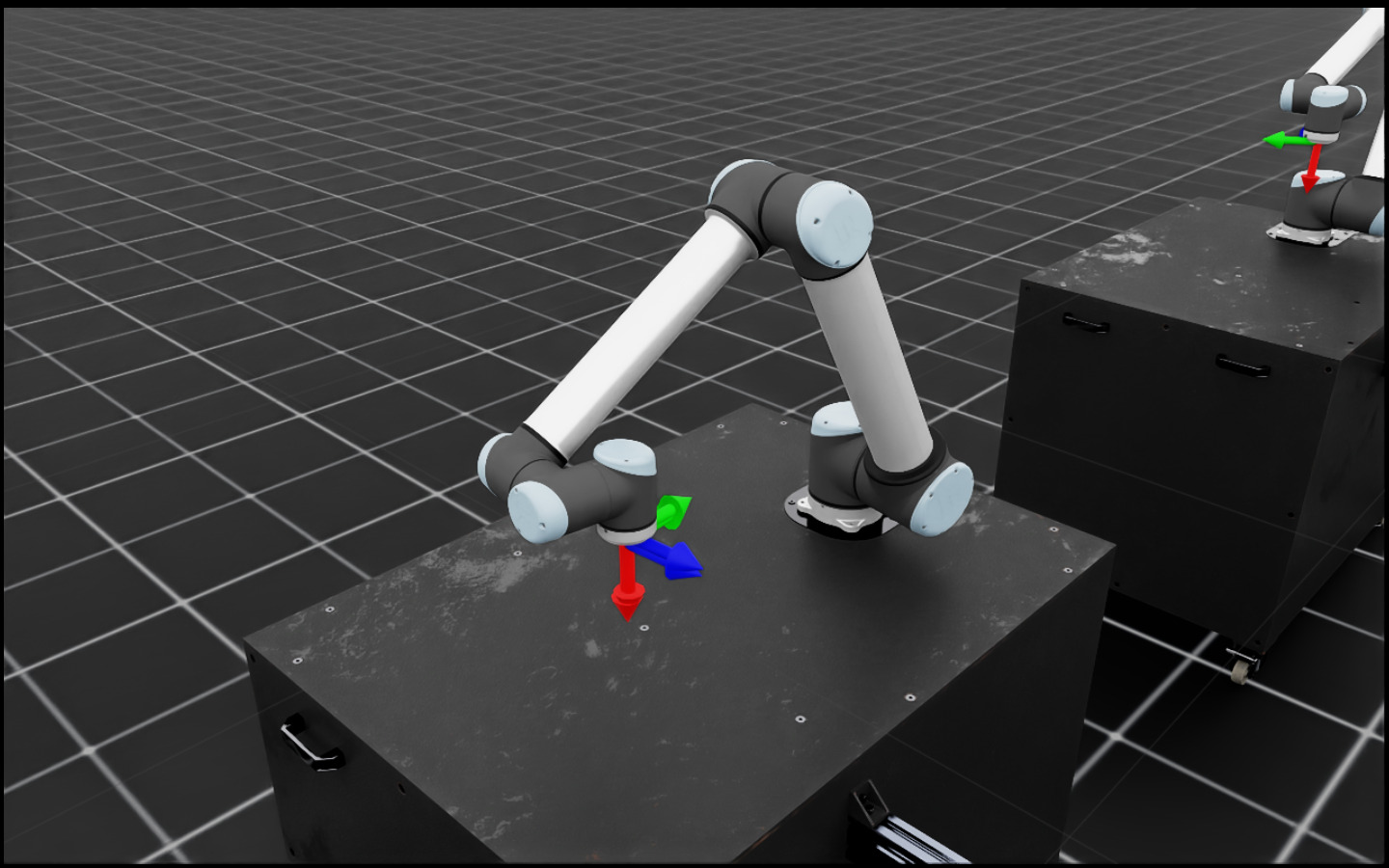
|
Move the end-effector to a sampled target pose with the UR10 robot |
|
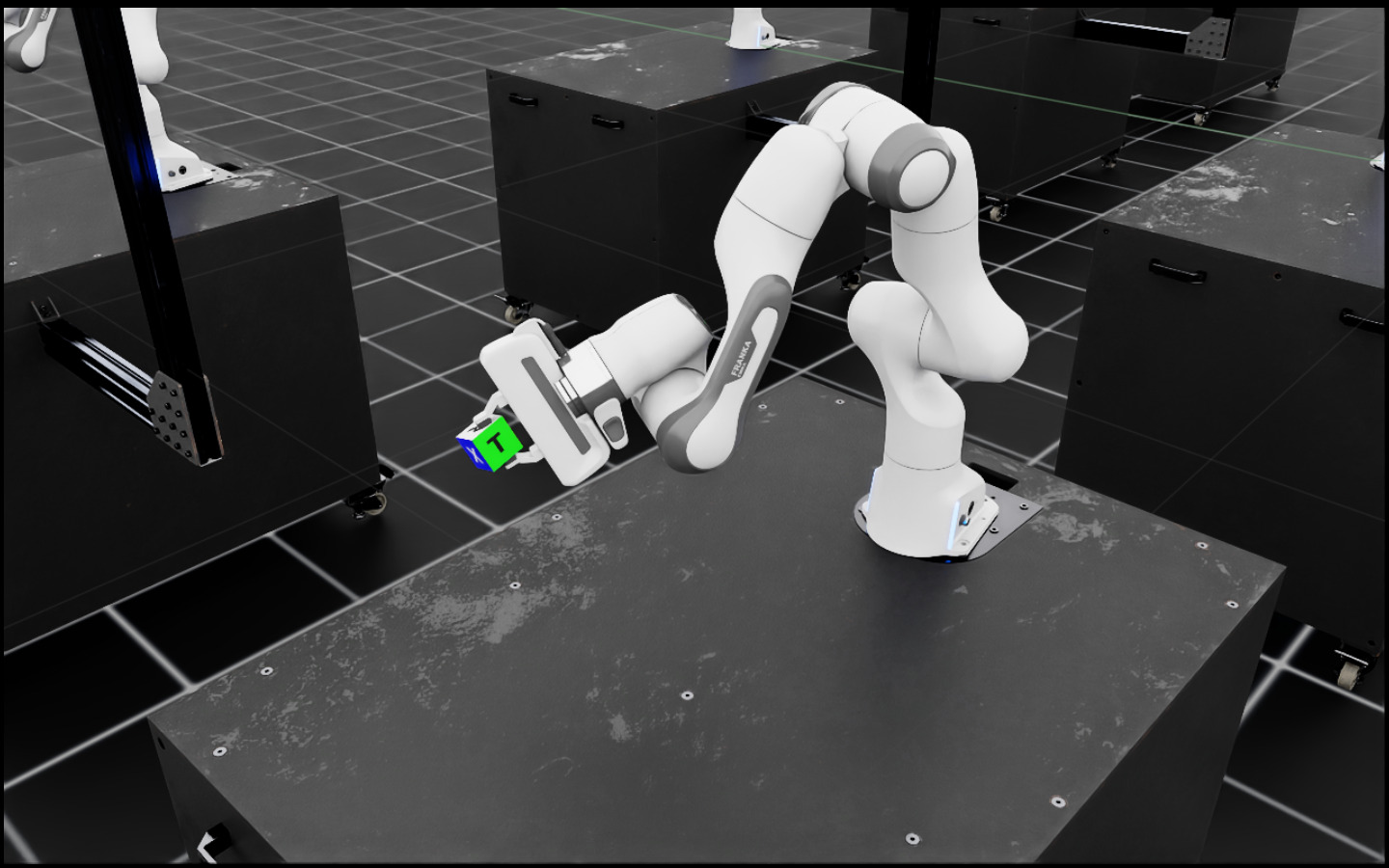
|
Pick a cube and bring it to a sampled target position with the Franka robot |
|
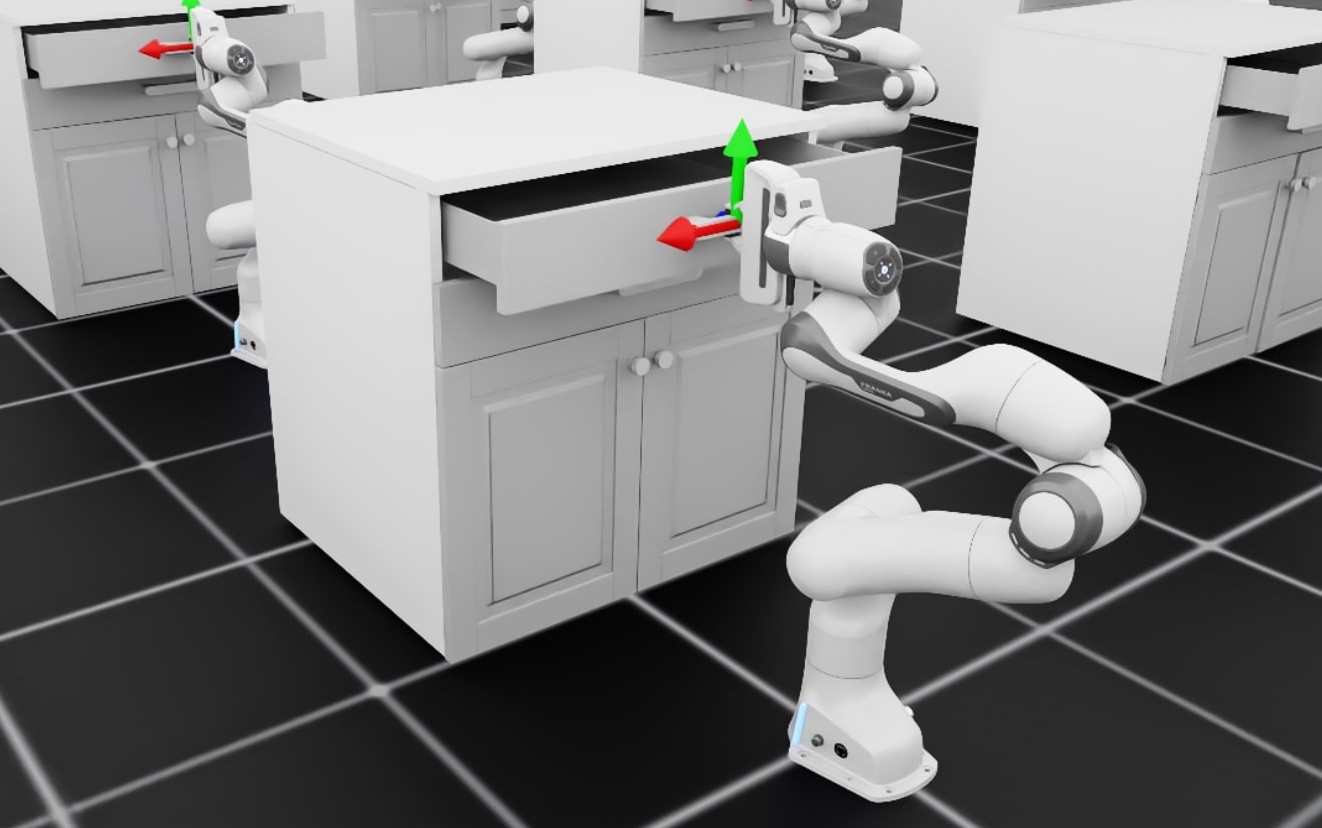
|
Grasp the handle of a cabinet’s drawer and open it with the Franka robot |
|
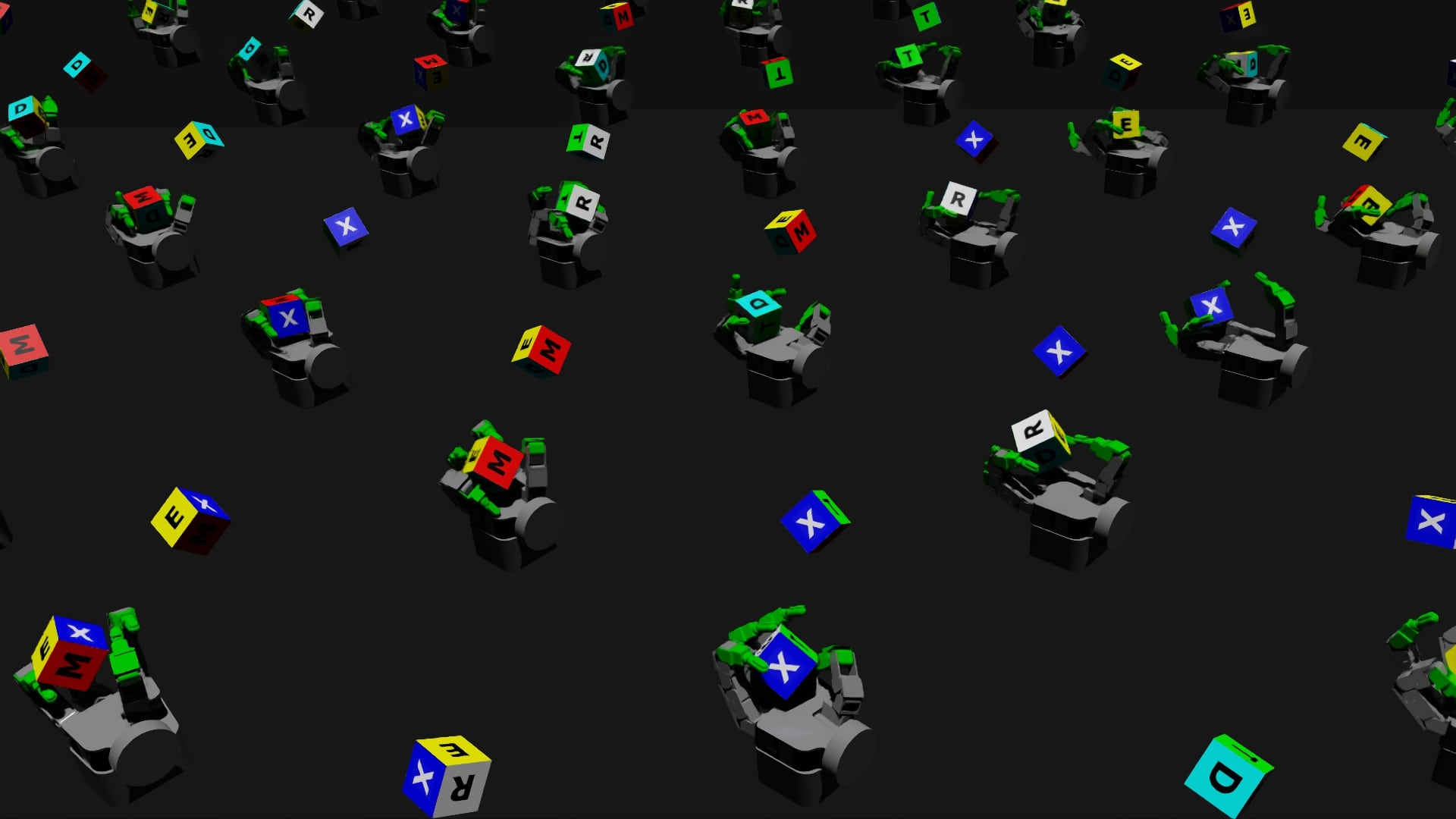
|
In-hand reorientation of a cube using Allegro hand |
Locomotion#
Environments based on legged locomotion tasks.
World |
Environment ID |
Description |
|---|---|---|
|
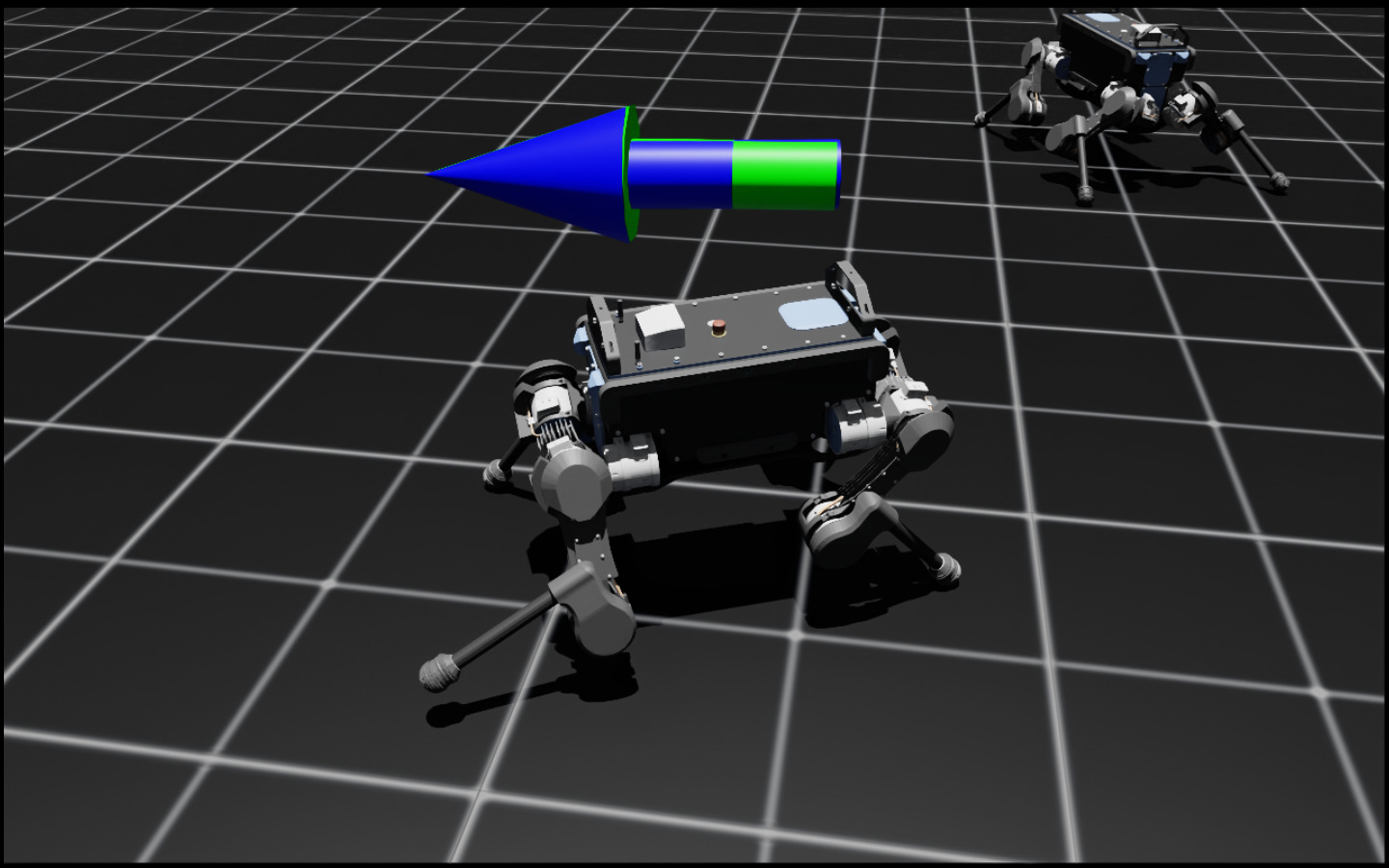
Track a velocity command on flat terrain with the Anymal B robot |
|
|
Track a velocity command on rough terrain with the Anymal B robot |
|
|
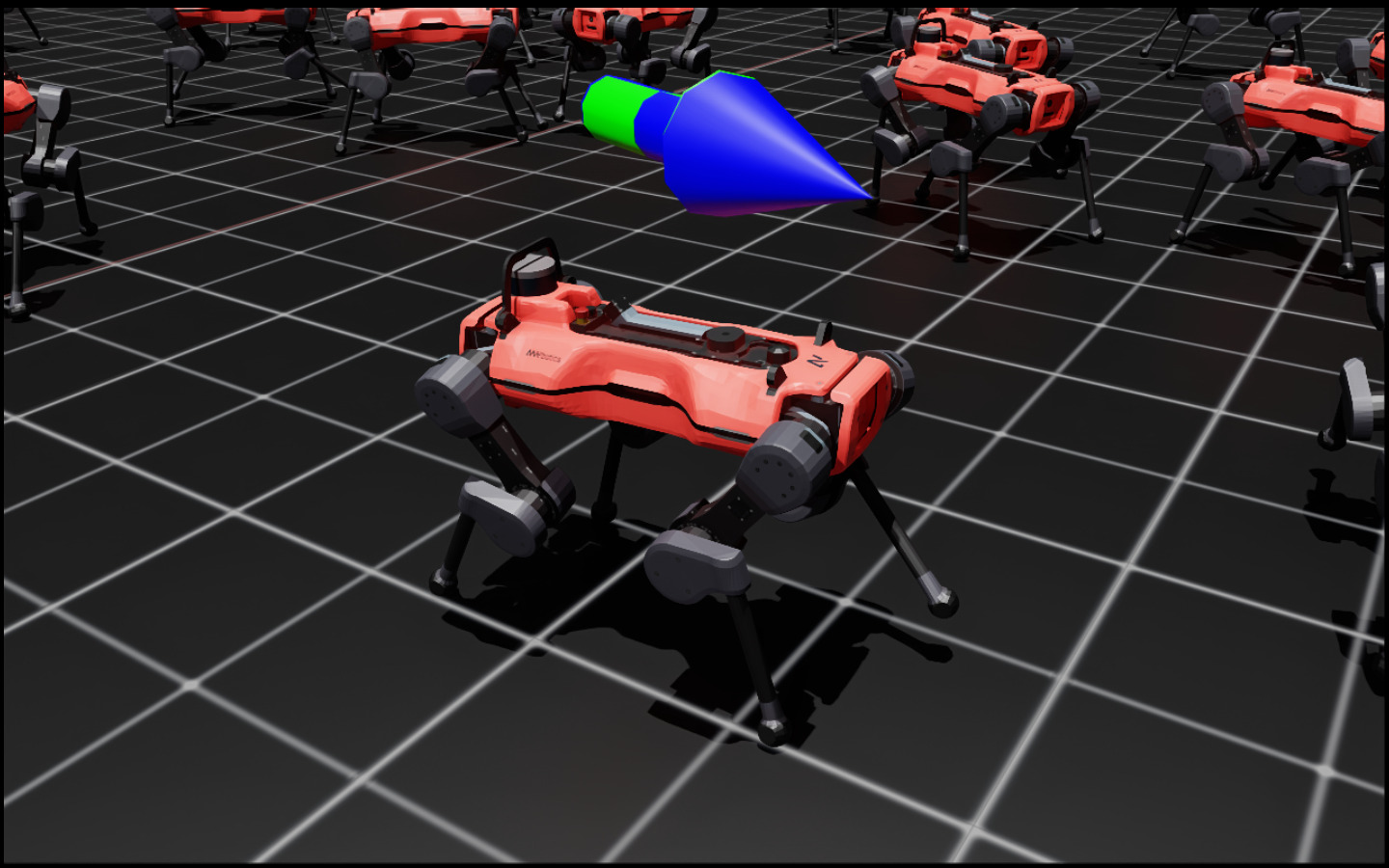
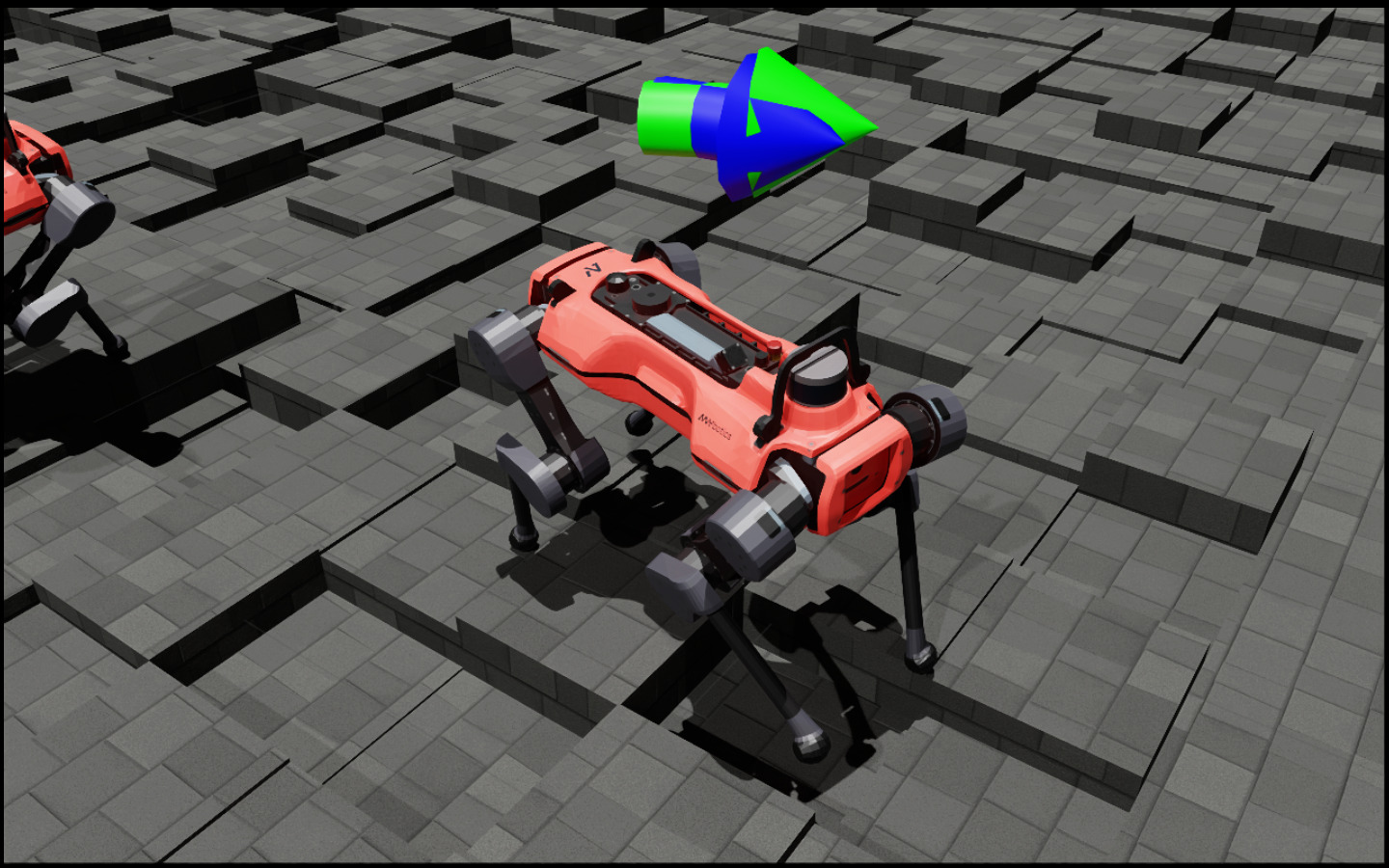
Track a velocity command on flat terrain with the Anymal C robot |
|
|
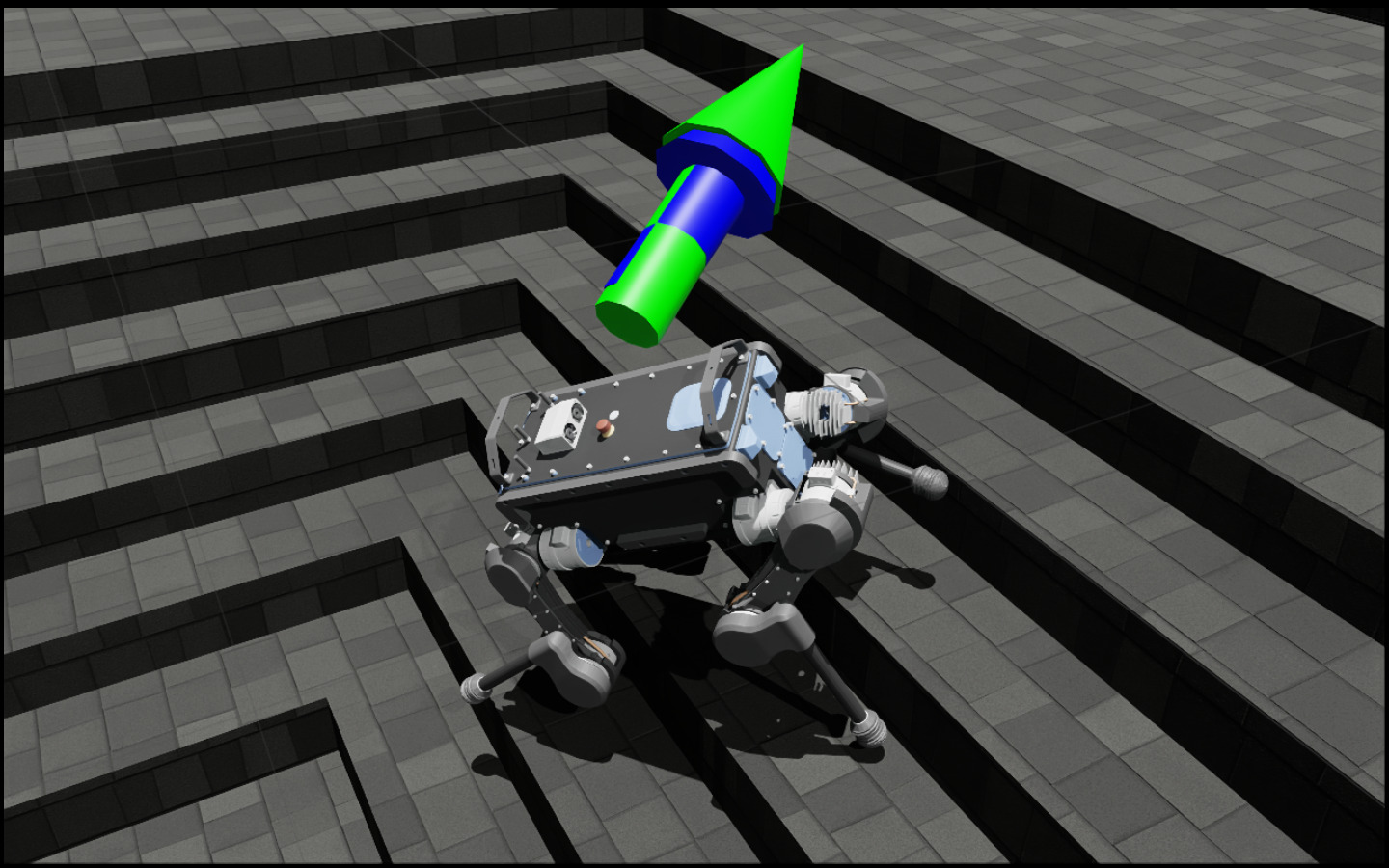
Track a velocity command on rough terrain with the Anymal C robot |
|
|
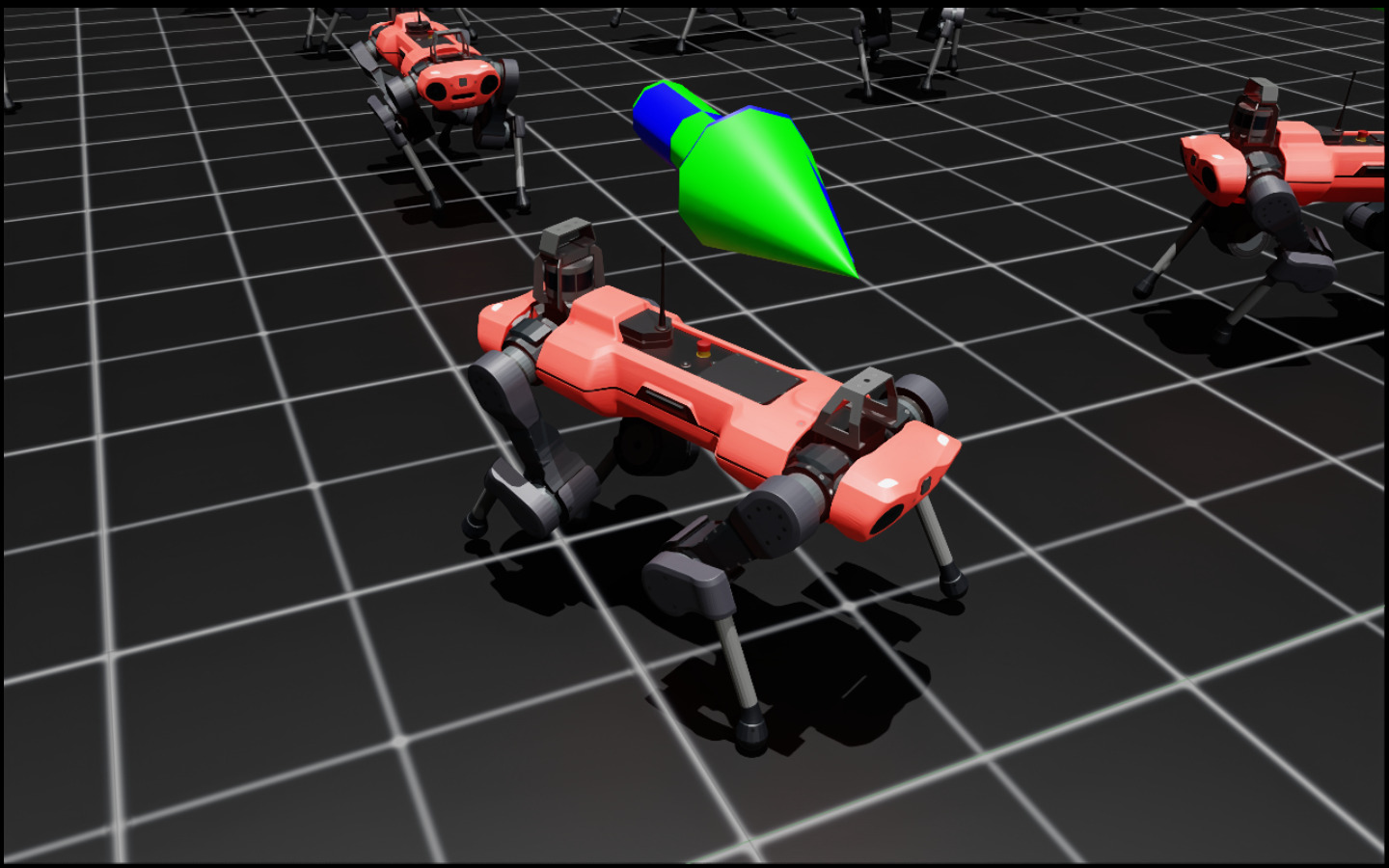
Track a velocity command on flat terrain with the Anymal D robot |
|
|
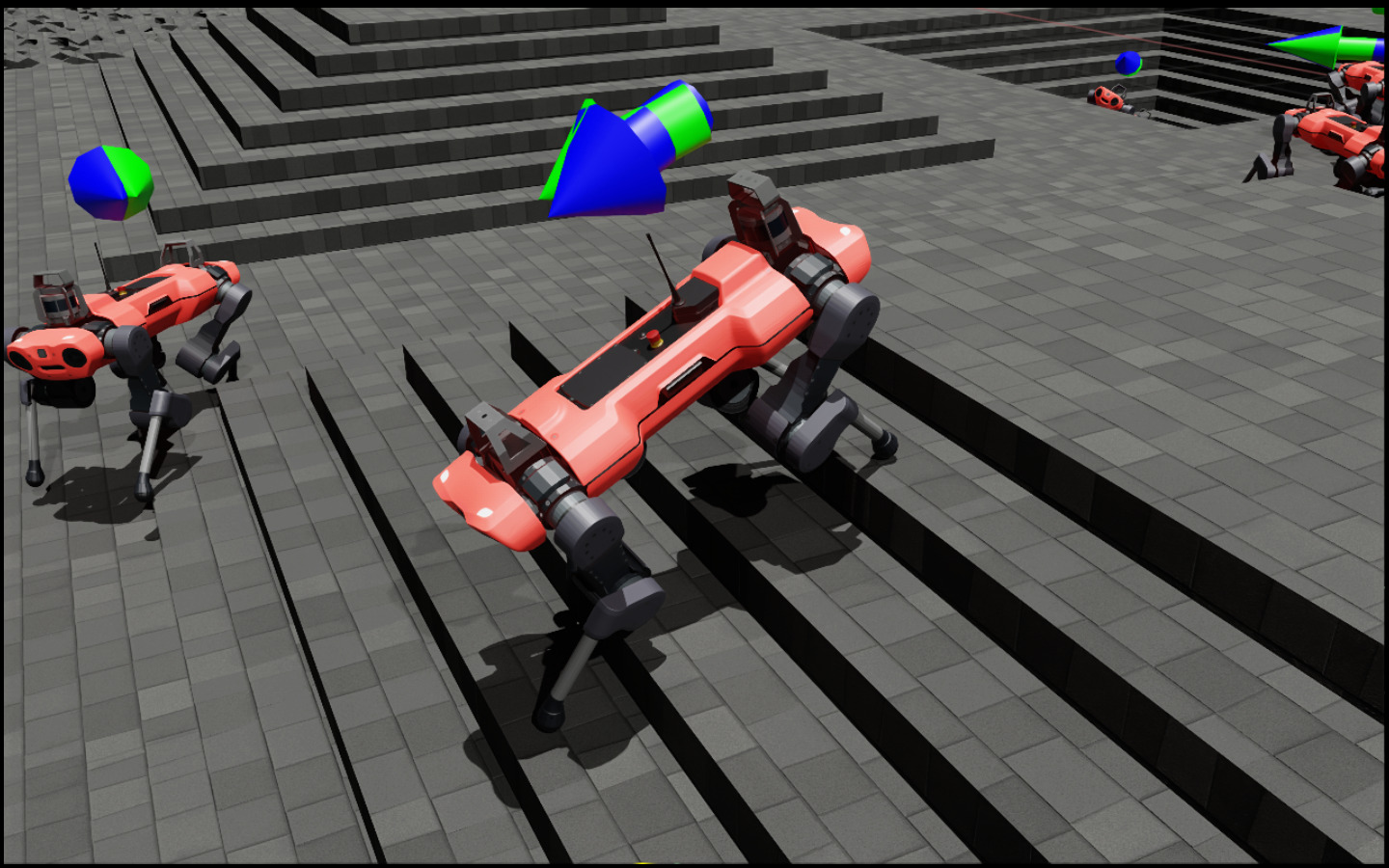
Track a velocity command on rough terrain with the Anymal D robot |
|
|
Track a velocity command on flat terrain with the Unitree A1 robot |
|
|
Track a velocity command on rough terrain with the Unitree A1 robot |
|
|
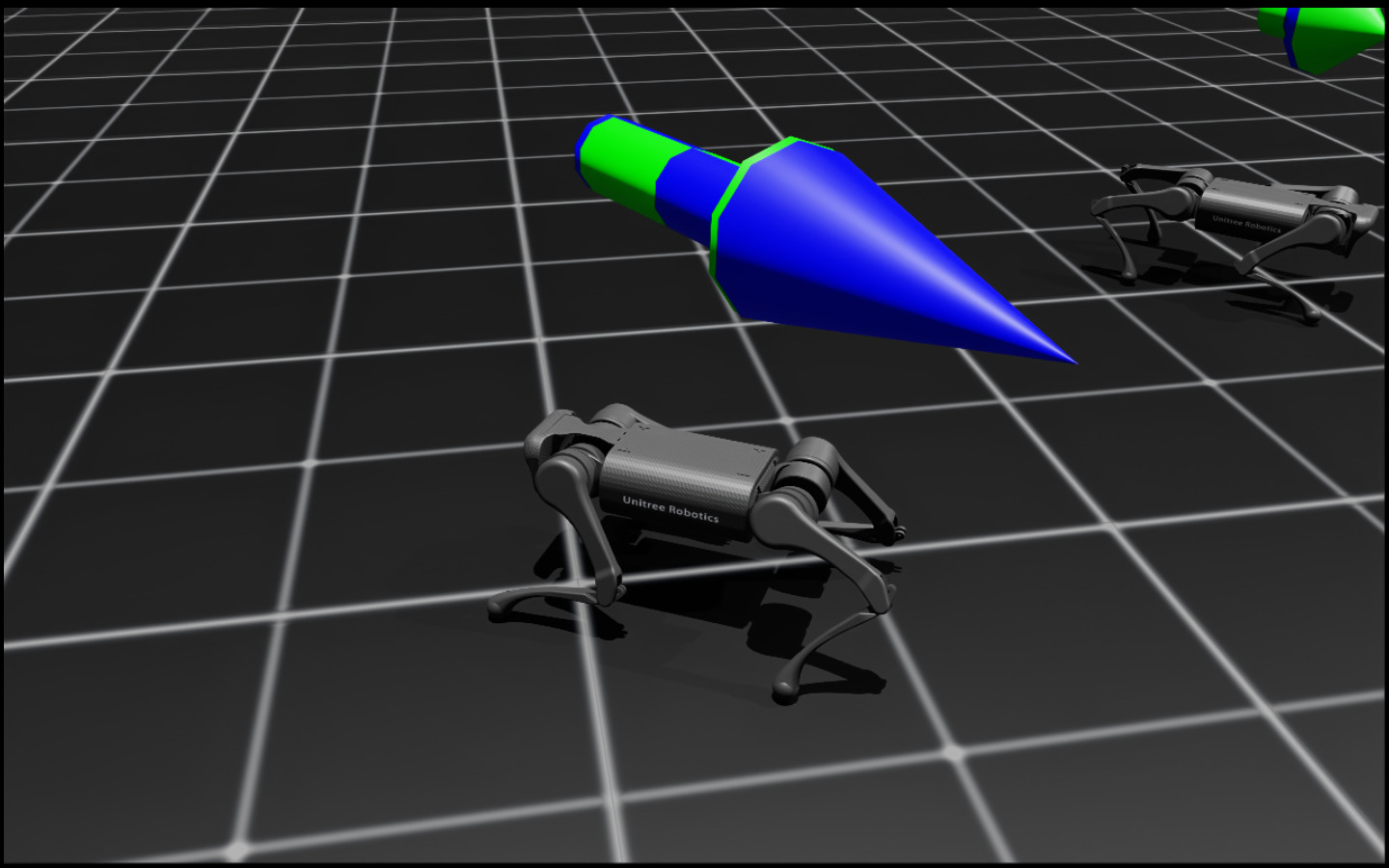
Track a velocity command on flat terrain with the Unitree Go1 robot |
|
|
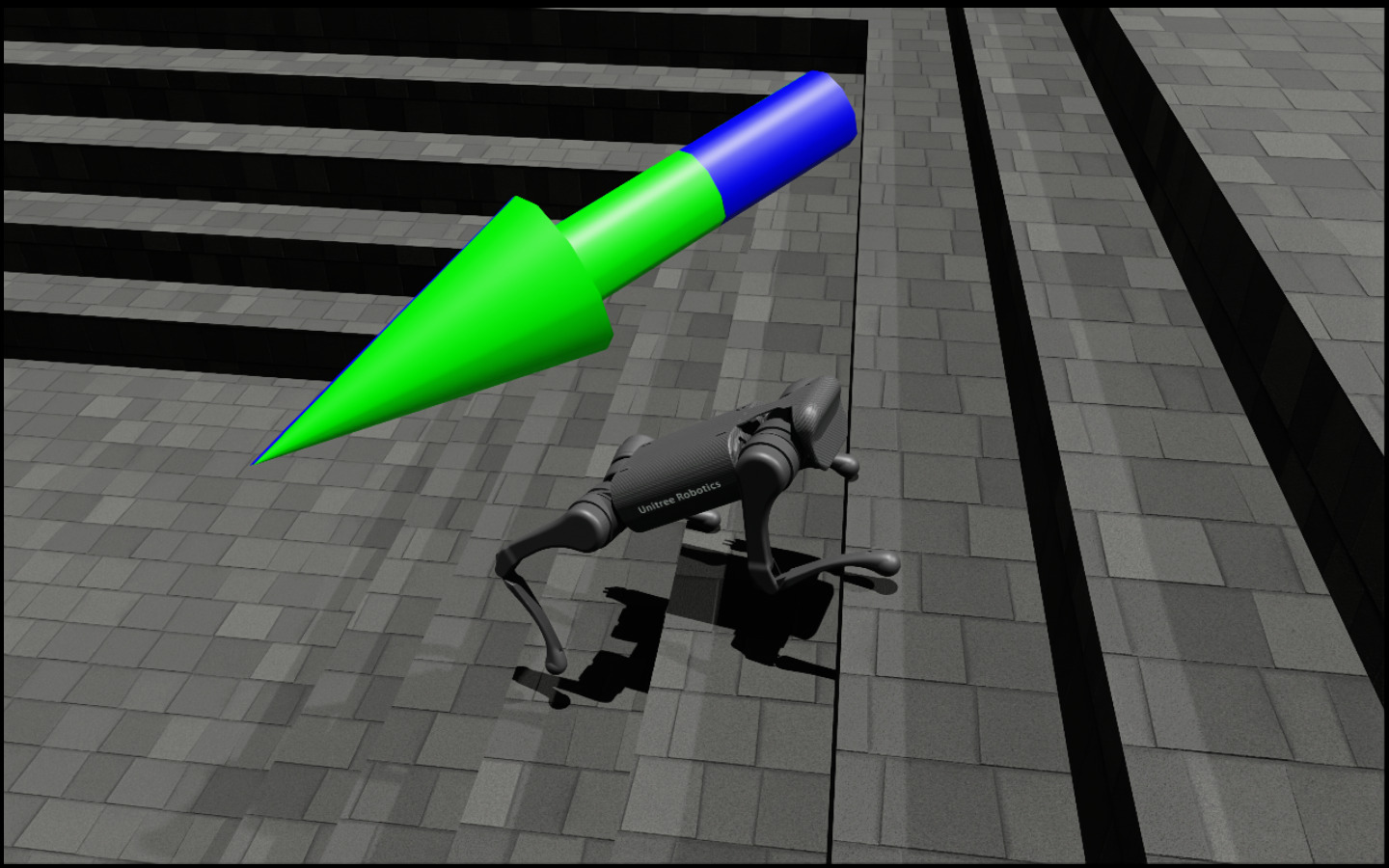
Track a velocity command on rough terrain with the Unitree Go1 robot |
|
|
Track a velocity command on flat terrain with the Unitree Go2 robot |
|
|
Track a velocity command on rough terrain with the Unitree Go2 robot |